2011
3D Scanning
Carrying out mutliple measurements of different depth cameras (Kinect 360, Kinect 2, Asus Xtion, Intel Realsense) using different surfaces distances, while measuring accuracy and precision. Using the scanned pointclouds to stitch 3D scenes. Constructing real life faces by mapping geometry and texture of scan on to a standard model.
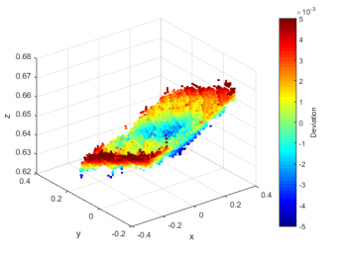
- Accuarcy and precision of several depth cameras
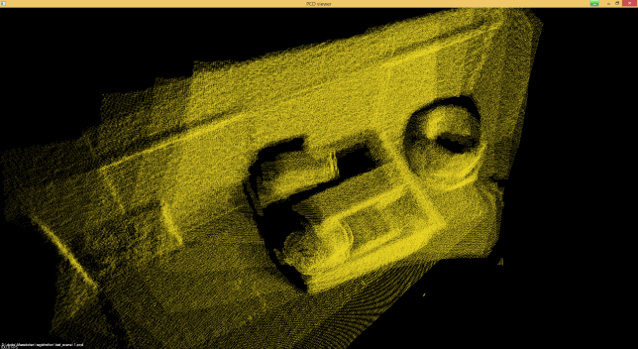
- Scene stitching
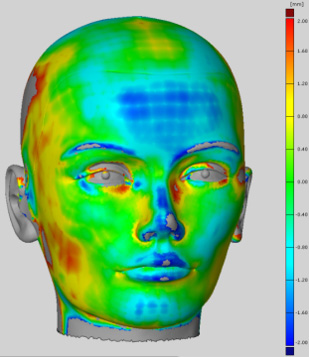
- Face construction of scan
- Mapping scanned face geometry on standard model